
| 起源の場所: | 中国 |
|---|---|
| ブランド名: | Hwashi |
| 証明: | CCC/CE/ISO |
| モデル番号: | HS-R6-08 |
| 最小注文数量: | 1/set |
| パッケージの詳細: | 木箱 |
| 受渡し時間: | 15-30の仕事日 |
| 支払条件: | L/C、D/A、D/P、T/T |
| After-sales Service Provided: | Engineers available to service machinery overseas | Name: | Hwashi Storage Rack Corner Welding Robot Unit |
|---|---|---|---|
| Driving Mode: | AC servo driving | Effective payload: | 8KG |
| Repeat Positioning Accuracy: | ±0.05mm | Motion Range: | ±360 degree |
| Max Speed: | 270 ° / s | Moving Radius: | 893 mm |
| Serve Life: | 8-10 years | ||
| ハイライト: | 井戸蓋産業用溶接ロボット、ステンレス鋼産業用溶接ロボット、井戸蓋溶接ロボットユニット,Stainless Steel Industrial Welding Robots,Well Lid Welding Robot Unit |
||
![]()

![]()
![]()

![]()
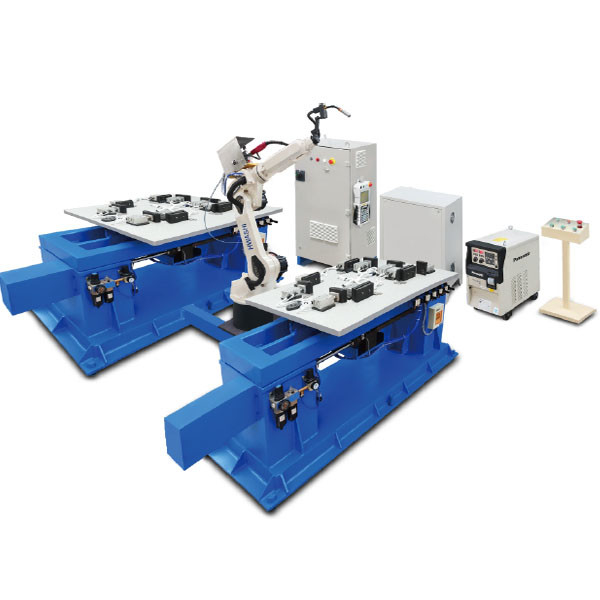
プロジェクト背景:ステンレス井戸蓋溶接ロボットユニット(インドの有名井戸メーカーにて採用)
顧客の要件:
1. 溶接労働力の代替としてロボットを活用する。製品の積み下ろしは手動で行います。製品を治具に一度固定します。
2. ワーク材質: 鉄鋼、肉厚: 0.8-1.2mm;サイズ: 300x300mm または 600x600mm
3. ワークの表裏交互に溶接し、変形を少なくしてください。
4. フロントウェル蓋とバックウェル蓋は別々のロボットで溶接されます。いくつかの手順でウェルの蓋を溶接します。
解決策:
1. 完全な溶接ロボットシステムには、HS-R6-08 アーム長 1.4m ロボット 2 セット、350A MIG 溶接機 2 セット、自動衝突防止溶接ガン 2 セット、一軸垂直回転ポジショナ 4 セット、溶接ガンクリーナー 2 セット、溶接治具 4 セットなどが含まれます。
2. 溶接品質の安定性と一貫性を保証するために、溶接ガンクリーナー装置を装備することをお勧めします。
3. 6軸ロボットMIG溶接機による自動溶接を行っております。シリンダーまたは高速クランプは、てこの原理で製品の位置を固定するために使用され、ロボットの自動溶接の位置決め要件を確保し、製品の各部分に確実に溶接できるようにします。生産効率の要件に従って、2 セットの 1 軸ポジショナが設計されています。1 つはワークピースのロードおよびアンロード用、もう 1 つは溶接用です。
ワークフロー:
1) ワークピースをステーション 1 ポジショナの治具に手動でロードします。
2) 溶接を開始します。
3) ロボットと溶接機は、事前に設定されたプログラムに従ってワークピースに溶接を行います。
4) 溶接が完了しました。
5) ステーション 1 が溶接している間、ステーション 2 は同期してワークピースをロードおよびアンロードします。
6) サイクルワーキング
適用効果
1. ダブルステーションポジショナレイアウトにより、長時間の連続溶接が実現でき、溶接効率と溶接品質が大幅に向上しました。
2. ポジショナーはワークピースのクランプを一度に実現し、製品の四隅の交互溶接を自動的に実現し、変形を効果的に制御します。
3. この機械は材料を手動で投入するだけで自動溶接を実現できます。また、溶接品質と溶接効率も向上します。さらに、製造コストも削減できます。手作業による不安定な品質と低い生産効率の問題を解決しました。
4. 手動溶接をロボットに置き換えます。溶接業界は高リスクの業界であり、高温、アーク光、溶接煙は労働者の身体的および精神的健康に一定の影響を与えます。
5. 溶接において溶接ロボットの代替としてロボットを使用することは避けられない傾向であり、これは市場の促進だけでなく、技術の高度化の必要性でもあります。